免费下载从业必备文件:CCAR-92 空域分类方法 国务院条例
大疆精灵4RTK因其操作方便,成本低廉,越来越多的测绘行业用户开始关注,并用其进行测绘外业数据的采集,因为大疆在无人飞行器上的技术积累,采用精灵4RTK的外业操作已经变得非常简单;内业方面,初学者可能对于数据处理软件的使用还有些不清楚,下面结合我们的实际操作经验介绍下精灵4RTK在RTK和PPK模式下结合PIX4D处理的过程(案例坐标系统为西安80坐标系统,高斯三度带,中央子午线120°)。
一、外业操作
1.1相控布设
因为精灵4RTK只能直接获取WGS84或CGCS2000坐标系下的pos数据,影像直接处理只能生成CGCS2000或者WGS84坐标下的正射。如果需要xian80坐标系下的正摄,则需要采用像控点纠正或者提前转换pos坐标为xian80坐标或是使用中海达UBase及其相应的PPK处理软件,对于无千寻覆盖区域和复杂的地形,可以在使用UBase的同时添加少量像控点,使精度进一步提高,进而满足测图精度要求。在不加像控的情况下,硬化平坦地形平面精度可达到2-5公分,高程精度3-5公分左右。高差大的复杂地区平面精度会达到3-10公分,高程精度5-15公分左右,如果需要1:500更高精度地形图,需要布设至少三个以上的像控点,并布设检查点,以做检核。像控的目的是为了更好地获取高精度的影像数据,和测图做控制网一样,要控制住测区范围,红色为相控,黑色为检查点。1:500的话建议间隔500-800米一个像控点,1:1000,1:2000可以间隔1公里一个点,小范围的话以控制住测区为宜,适量布设像控点。

1.2数据获取
飞行正射时选择关闭畸变校正,后期相机参数进行计算输入Pix4D。飞行前首先测区KML导入,规划航线,飞行高度依据项目要求,一般重叠率航向80,旁向70,如果测区颜色单一或者地形起伏较大,可适当增加重叠度。
二、前期POS数据处理
2.1.获取xian80坐标系下的正摄模型
(2.1.1为RTK模式数据处理,2.1.2为PPK模式数据处理)
2.1.1RTK模式数据处理
即为应用精灵4RTK本身内嵌的千寻网络,实时载波相位差分定位实现飞机的POS精度达到厘米级精度。
提取照片pos数据,先转换坐标再处理
在无人机照片数据中每个文件夹有一个.MRK的文件,用电子表格打开该文件,将经纬度三列单独复制出来

点名按照照片顺序,把名称编辑好,点名一定要和照片名称对应,包括.JPG,然后导入坐标转换软件通过RTK计算的坐标转换参数将经纬度坐标转换为当地坐标数据。(转换软件使用的中海达的HGO软件,虽然转换麻烦但是后期刺像控会省去很多时间)

2.1.2.利用UBase静态数据进行PPK解算


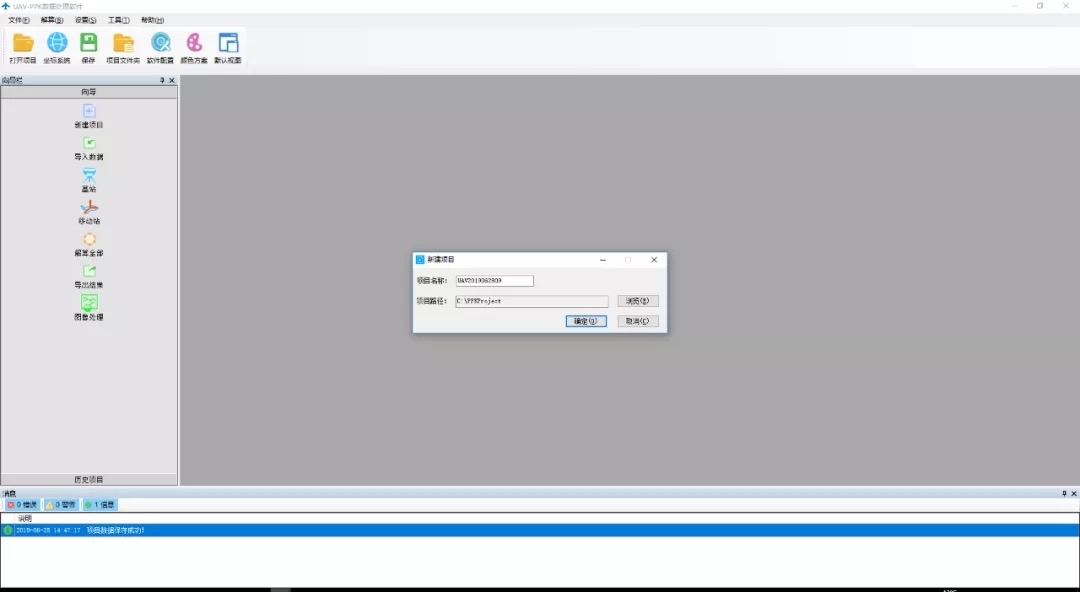
首先将Ubase静态数据导出,打开PPK处理软件进行注册,新建项目;导入基站与移动站数据,拍照点文件,照片文件夹;输入目标坐标系统,中央子午线,七参数;输入基站信息,移动站信息,本软件专门为精灵p4rtk开发,因此移动站信息默认即可,有特殊情况需进行更改;进行解算;导出成果。
1)新建项目
2)导入数据

输入工程坐标系统及参数

3)基站设置,基站信息输入,选择目标椭球,选择xyz,输入UBASE所架位置坐标(测量UBASE坐标时建议天线高设置量取到仪器底部杆高设为0,在此处软件中天线也对应设置)
移动站不用设置

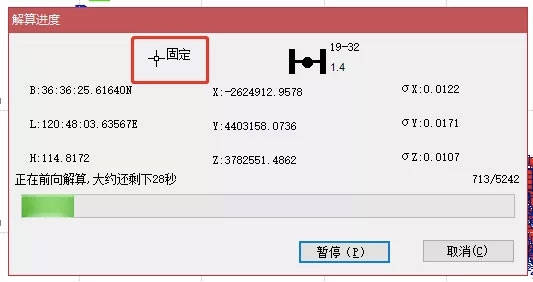
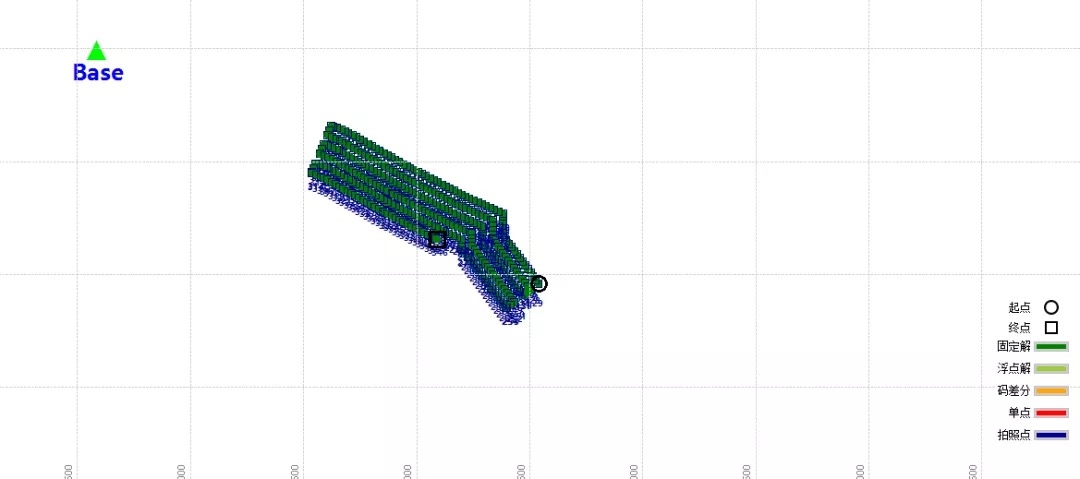
4)点击解算全部进行数据处理,达到固定解,绿色为固定解
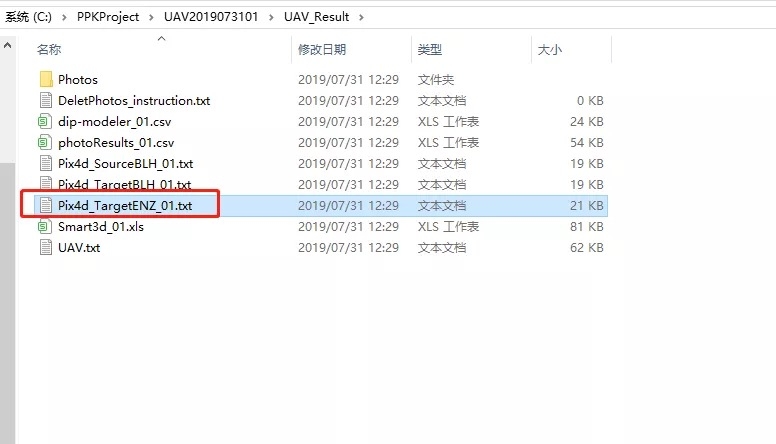
5)数据导出(可导出多种软件应用格式,PIX4D用画红线的)
三、影像数据处理
3.1打开PIX4D软件

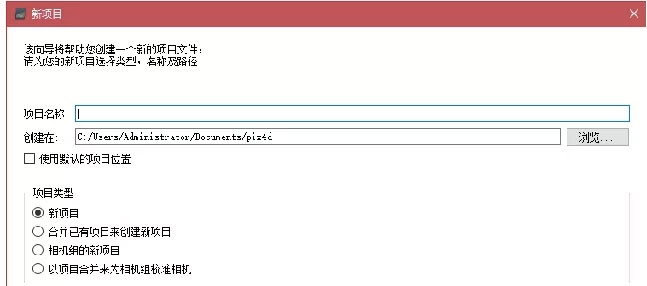
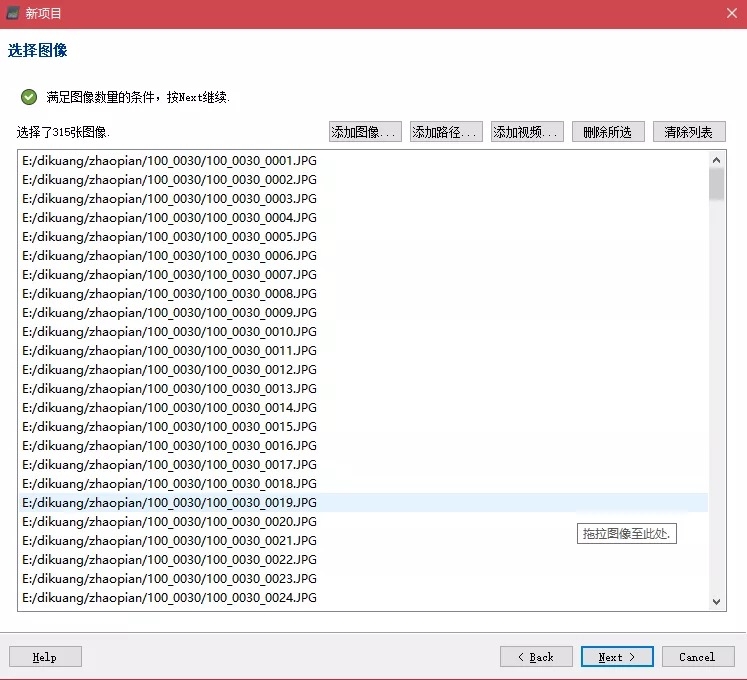
3.2新建项目(如果进行多个项目合并,可以分开跑高精度初始化,然后新建合并已有项目直接进行刺点,重新优化和第三步生成DOM,DSM操作)
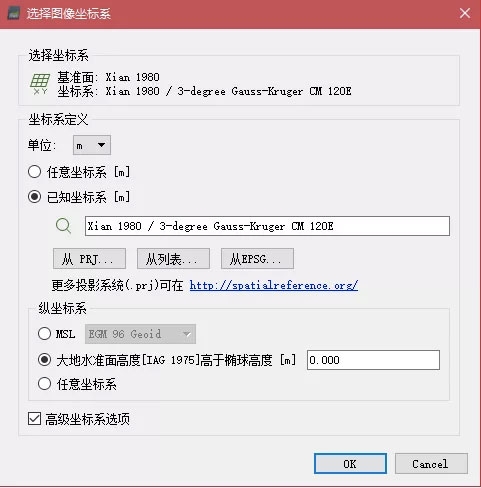
3.3导入照片,坐标系编辑选择当地坐标系(如果转换后坐标是国家80坐标系统,就选择相应中央子午线,纵坐标选择大地水准高度),地理定位选择从文件中,格式根据TXT格式,我们选择之前转换的是X,Y,Z(这里的XY和地理坐标中是反的),点击ok.
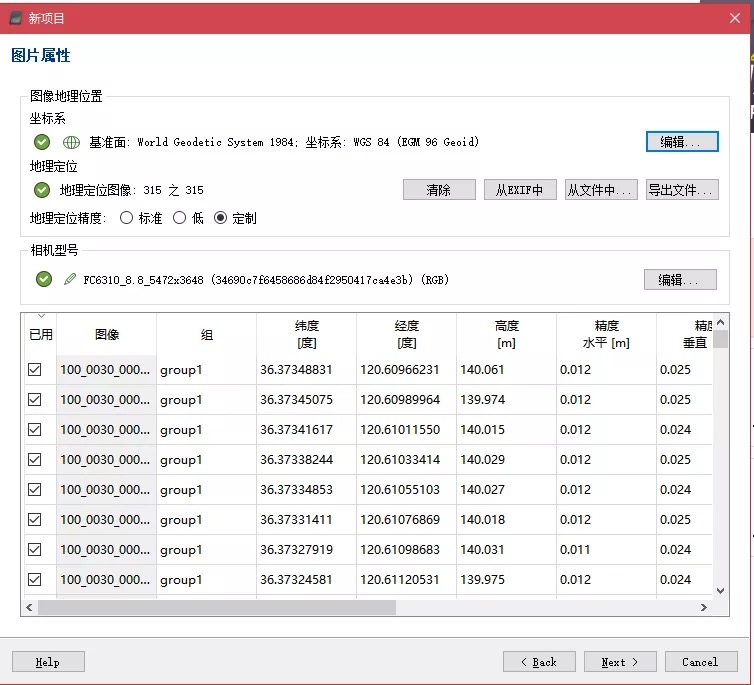

地理定位即为我们之前处理的POS数据,选择导入即可

相机型号这一个地方,需要匹配一下相机参数(精灵4RTK飞行时,未打开畸变校正功能,照片中才会有相机参数)
下一步是计算相机参数,每台飞机参数有差异不可以混:
用记事本打开大疆精灵4RTK的照片,搜索Dew找到下图所示,根据下图所示进行参数计算

DEW之后的数据为相机参数,计算方式为:

计算好,并填入参数保存并点击ok,进入下一步
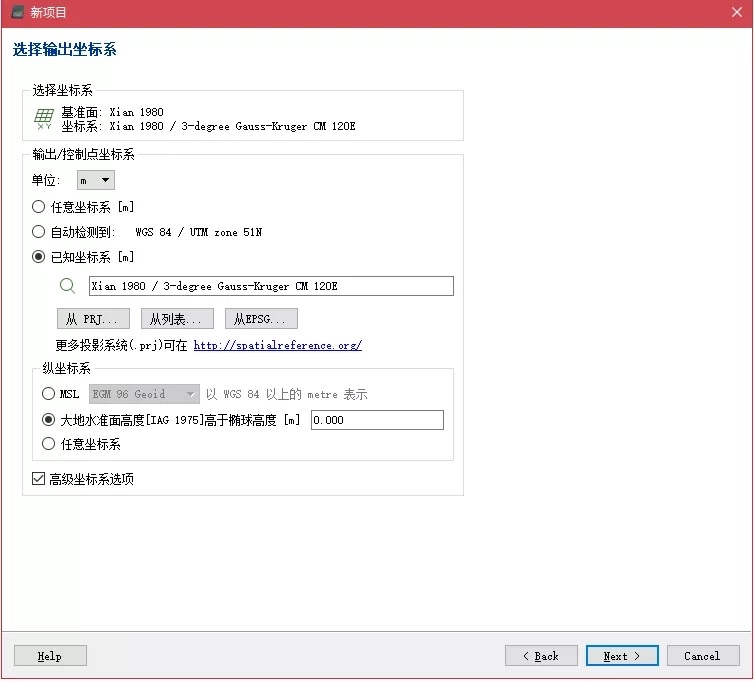
设置设置输出坐标(这里需要的坐标系统为西安80),进入下一步
点击3D Maps,点击Finish

进入如下图所示界面
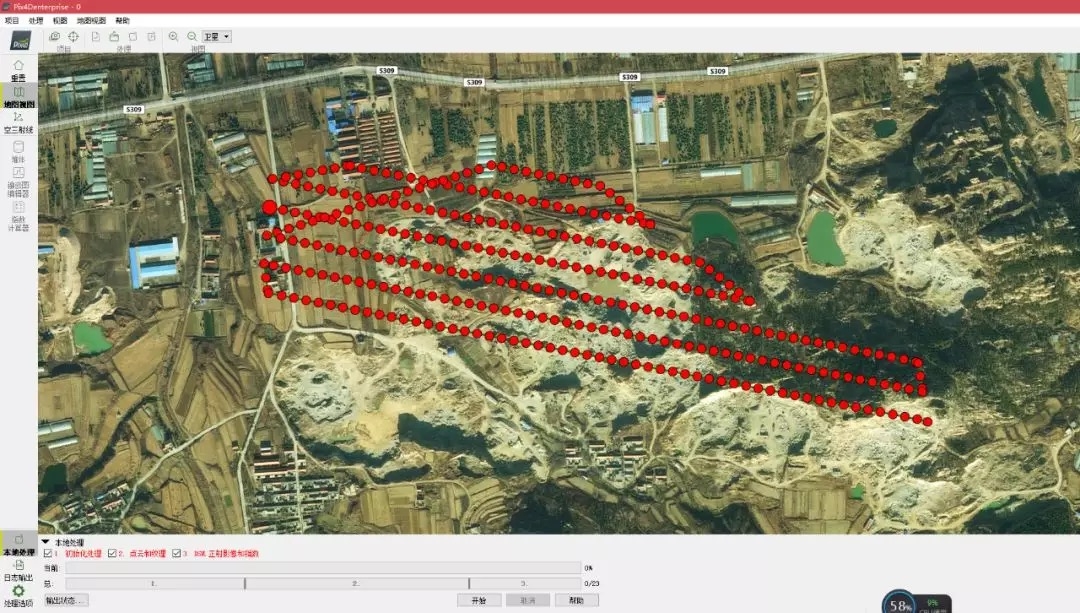
导入像控点

先进行初始化快速检测,照片没有问题,再刺相控点
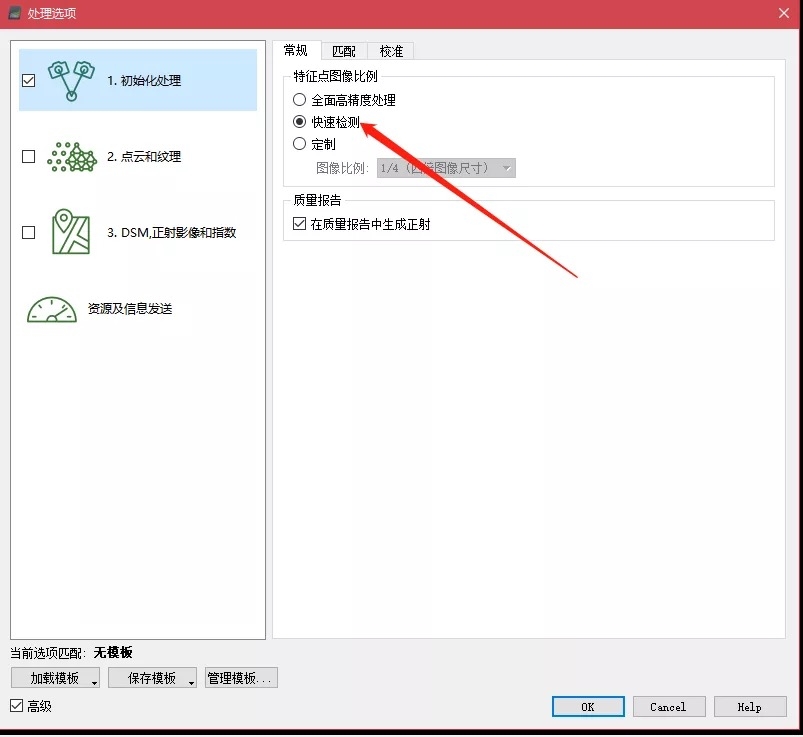
快速初始化后,刺相控点
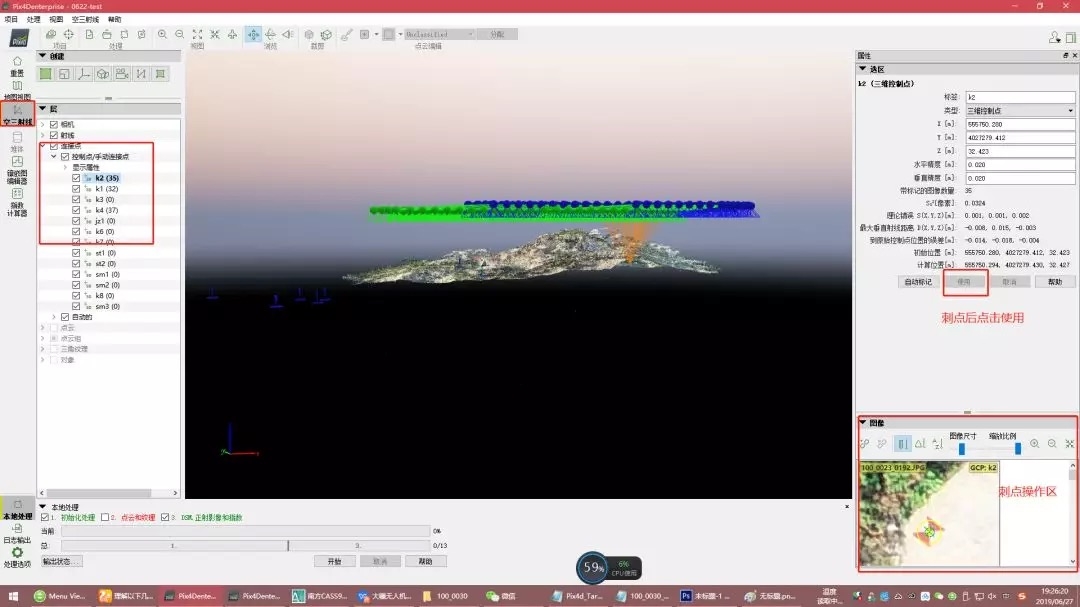
刺点后,进行点击处理》重新优化;优化完成后,在处理选项设置中,设置高精度初始化,把第三步DSM正射打钩,点击开始处理。

处理完成,显示绿色,点击镶嵌图编辑器,进行影像微调,完成影像处理。











